PCL(PointCloudLibrary)是一个开源的C 库,用于处理点云数据,通常用于3D数据处理、机器视觉和机器人学等领域。PCL1.8.0是该库的一个版本,提供了丰富的功能和示例代码,帮助用户理解和应用点云处理技术。
PCL1.8.0的例子通常包括以下几类:
1.点云读取和写入:如何从文件中读取点云数据,以及如何将处理后的点云数据保存到文件中。
2.点云滤波:如何使用不同的滤波算法(如体素下采样、统计滤波、法线估计等)来改善点云数据的质量。
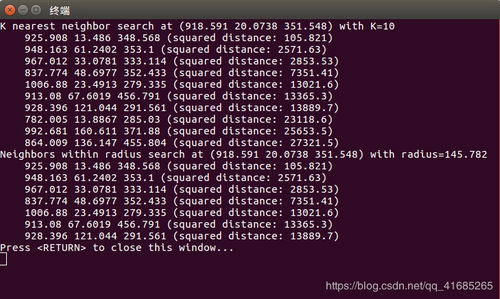
3.特征提取:如何从点云中提取特征,如表面法线、曲率、关键点等。
4.物体识别和分割:如何使用不同的算法(如欧式聚类、区域增长、基于模型的分割等)来识别和分割点云中的物体。
5.估计和匹配:如何使用不同的算法(如迭代最近点、点特征直方图等)来进行点云之间的配准和匹配。
6.三维重建:如何使用点云数据来重建三维模型。
7.机器视觉应用:如何将PCL与其他机器视觉库(如OpenCV)结合使用,来实现更复杂的视觉任务。
这些例子通常包含详细的代码注释和解释,帮助用户理解每个步骤的目的和实现方式。通过这些例子,用户可以快速上手PCL库,并根据自己的需求进行修改和扩展。
一、PCL1.8.0简介
PCL(PointCloudLibrary)是一个开源的、跨平台的库,用于处理点云数据。PCL1.8.0版本是PCL的一个重要里程碑,它提供了丰富的算法和工具,用于点云的预处理、特征提取、配准、分割、表面重建等。本文将详细介绍PCL1.8.0版本的一些关键特性和使用方法。
二、PCL1.8.0新特性

PCL1.8.0版本引入了许多新特性和改进,以下是一些亮点:
三、PCL1.8.0使用方法
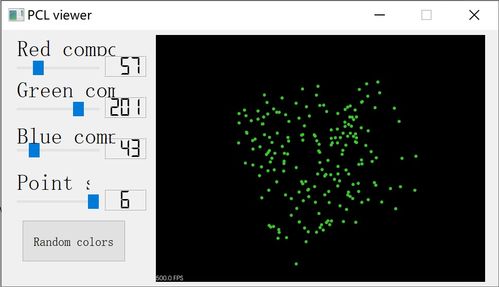
以下是一个简单的示例,展示如何使用PCL1.8.0进行点云的加载、滤波和可视化:
#include#include#include#include#includeintmain(intargc,charargv){//加载点云数据pcl::PointCloud::Ptrcloud(newpcl::PointCloud);if(pcl::io::loadPCDFile("example.pcd",cloud)==-1){PCL_ERROR("Couldnotreadthefile");return-1;}//创建滤波器对象pcl::StatisticalOutlierRemovalsor;sor.setInputCloud(cloud);sor.setMeanK(50);sor.setStddevMulThresh(1.0);sor.filter(cloud);//创建可视化对象pcl::visualization::PCLVisualizerviewer("PCLVisualizer");viewer.addPointCloud(cloud);while(!viewer.wasStopped()){viewer.spinOnce();}return0;} 四、PCL1.8.0应用案例
以下是一些使用PCL1.8.0进行点云处理的实际案例:
- 机器人导航:使用PCL进行点云的预处理、配准和路径规划。
- 3D扫描:使用PCL进行点云的分割、表面重建和特征提取。
- 工业检测:使用PCL进行点云的配准、分割和缺陷检测。
五、
PCL1.8.0版本是一个功能强大的点云处理库,它提供了丰富的算法和工具,可以满足各种点云处理需求。通过本文的介绍,相信读者已经对PCL1.8.0有了初步的了解。在实际应用中,读者可以根据自己的需求选择合适的算法和工具,进行点云的处理和分析。